

Avant de commencer, consultez attentivement ces images, qui montrent ou seront placé les moteurs, avec leur numéro et leur orientation:

 sont à gauche")
Accrochez les Us ensemble de cette manière:

Vous pourrez utiliser des vis (M3x8) ou de la colle très forte.
Pensez à vérifier que vos moteurs sont bien positionnés en position zéro. Pour cela, vérifier que l'encoche sur le boitier plastique est bien alignée avec l'encoche de l'axe:

Placez maintenant le moteur 1 dans l'encoche d'un des Us, et attachez-le avec des rivets. Pour cela, placez le corps d'un rivet dans l'encoche, puis vérouillez-le avec la fixation du rivet (plus petit). Cela devrait ressembler à ça:

De l'autre coté, insérez une poulie (grise) puis placez également 4 rivets. Vous pouvez à présent placer un long rivet (gris) au milieu:


Vous pouvez répéter l'opération avec le moteur 2:
Désormais, nous allons attacher le moteur 3. Attention à le mettre dans le même sens (partie noire) que le moteur 2. Nous allons laisser dépasser un câble qui permettra d'atteindre le moteur 2, puis les attacher à l'aide d'une plaque latérale. Laissez bien dépasser le câble du coté ou le moteur 1 a son axe (partie noire), ce sera le dessus du robot:

Enfoncez maintenant les 11 rivets dans la plaque supérieur. Le douzième ne peut pas être placé car il se superpose à la sortie du câble:

Nous allons maintenant placer le câble de l'autre coté. Notez que ce dernier restera à l'intérieur du robot (il n'a pas besoin d'être gaîné). Enfoncez alors les 10 rivets. Les 2 rivets du milieu ne peuvent également pas être placés car ils se superposent au câble:




Vous pouvez désormais attacher le bout de la patte au dernier moteur (avec une poulie). Votre première patte est terminée!

Répétez cette opération pour les pattes 4 5 6, 7 8 9 et 10 11 12.
Nous allons maintenant utiliser les deux pièces restantes pour assembler le corps. Faites bien attention à l'ordre des pattes. Vous pouvez utiliser 12 rivets de chaque coté (en haut et en bas) pour ce faire. Attention également: chaque patte arrive sur le corps avec la partie noire (l'arbre du moteur) vers le haut:



")
Vissez tout d'abord les deux coupleurs de batteries (LBB-040) comme cela:


Ensuite, accrochez-les au corps, à l'aide de deux vis qui correspondent aux deux trous du dessus du corps:

Vous pouvez maintenant placer les deux batteries dans les coupleurs puis installer les plaques de 5x12 sur le dessus avec des rivets, en ayant pris soin d'accrocher le module BT-210:

Ensuite, installez la carte de contrôle électronique. Vous pouvez utiliser des rivets gris longs.

Branchez ensuite le module bluetooth, les batteries, puis utilisez les longs câbles de 160mm pour connecter les moteurs:


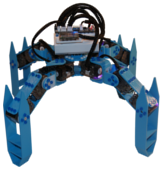
Voilà! Votre robot est maintenant complet. Si vous l'allumez à l'aide de l'interrupteur sur la carte de controle, les moteurs devraient s'allumer en rouge et la carte bluetooth clignoter en bleu:
