

PILOTAGE ROBOT METABOT V1
Maintenant que votre robot est assemblé, nous allons le piloter.
Utiliser l’application Android (Bluetooth)
L’application Metabot est disponible sur Android sur le Play Store, elle vous permettra de vous appairer avec votre robot et de le piloter
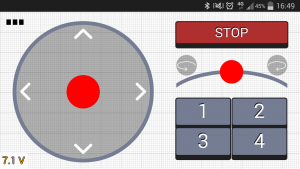
Au moment de vous appairer avec le robot, utilisez le code « 0000 » pour vous connecter
Utiliser le terminal (USB/Bluetooth)
La connexion au terminal se déroule de la même manière que vous soyez en USB ou en Bluetooth.
Dans les deux cas, un port série apparaîtra sur votre ordinateur.
Sous Windows
En branchant votre carte, vous devriez voir apparaître un port série avec un numéro dans le gestionnaire de périphériques:
De la même manière, si vous vous apparairez en bluetooth avec le robot dans le gestionnaire de Windows, vous trouverez un port série dans le gestionnaire.
Vous pouvez alors utiliser PuTTY, en mode série, en entrant le nom du port (par exemple COM4).
Sous Linux
Sous Linux, pas besoin d’installer des pilotes. Le port série devrait s’apeller /dev/ttyACM0 en USB, et /dev/rfcomm0 en bluetooth.
Vous pouvez utiliser le programme cu, en tapant cu -l /dev/ttyACM0 par exemple pour ouvrir une connexion avec le robot.
Commandes
Tappez start, le robot devrait s’allumer en vert et se mettre en position initiale.
De la même manière, vous pourrez à tout moment taper stop pour relâcher les moteurs, le robot s’allumera en rouge.
Les trois paramètres principaux sont dx, dy et turn:
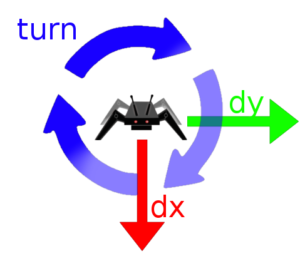
Paramètres de locomotion
Par exemple, si vous tapez dx 50, le robot avancera tout droit devant lui, de 50mm par pas.
Si vous tapez turn 20, il tournera sur lui même de 20° par pas.